


霍尔开关定位系统及其在数控装置中应用
在应用经济型数控系统改造机床工作中,如何解决原点和位置控制问题是至关重要的。我们在对国产开关型霍尔集成电路进行大量试验研究的基础上,研制成霍尔传感脉冲定位系统并将它成功的应用于微机控制组合镗床上,取得了很好的效果。
利用霍尔开关做位置传感组成定位系统有三种基本方法:跳变边定位法、眺变区几何中心定位法和霍尔元件感应中心定位法。
几何中心和感应中心定位法工作原理
图1,图2是几何中心定位法和感应中心定位法工作原理图。几何中心定位法采用单向平动方式;感应中心定位法采用双向平动方式。它们都是用检测霍尔开关跳变区宽度的方法进行判位的。前者用跳变区几何中心做定位基准,后者用霍尔元件感应中心做定位基准。这两种方法与跳变边定位法相比最本质的差别是:它们都不使用跳变点做基准。这就最大限度的缩小了环境温度对定位基准的不利影响。由图l.2看出,基准点的温度漂移为:

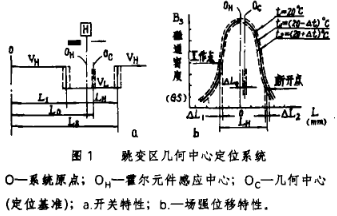
由于△L1和△L2的符号是相反的(见图1.2-b),并且|OLIl≈|△L2|,因此△Lo≈0,可是其定位精度是很高的。试验表明,在一般工业条件下,它们的定位误差要比跳变边定位法小1~2个数量级。
霍尔开关定位系统结构及工作模型
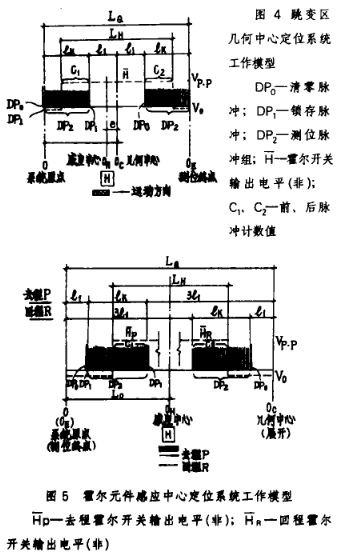
图3是用于机床定位的霍尔开关系统典型结构。图4、图5是根据上述原理建立的两种工作模型。它们都采用步距脉冲(图中DP2)做测量标尺两个模型的不同点是:几何中心定位法测位终点在Og点,测位区要占据一定的行程长度.感应中心定位法测位终点在O点,测位区不占行程长度用上述模型建立的脉冲定位系统可应用于各种机械的点位控制。
霍尔脉冲定位系统在数控中的应用
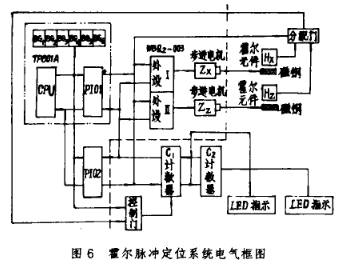
图6是用于微机控制组合镗床的霍尔脉冲定位系统电气框图。
该测位系统以微机驱动机构的脉冲当量作为位移标尺,每一个或几个脉冲当量发出一个测位脉冲,因此系统的分辨率为土1脉冲步距。
系统的重复定位精度取决于下述三个因素,列式如下:△X =△XH+△Xz+△XK,式中,△X一定位系统的重复定位误差;△Xr一程尔开关的定位误差; △Xz一步进电机的1复定位误差;△Xk一传动机构的重复定位误差。根据步进电机的工作特性,其累计误差很小,可以认为它的重复定位误差△Xz≈0.
利用霍尔开关做位置传感组成定位系统有三种基本方法:跳变边定位法、眺变区几何中心定位法和霍尔元件感应中心定位法。
几何中心和感应中心定位法工作原理
图1,图2是几何中心定位法和感应中心定位法工作原理图。几何中心定位法采用单向平动方式;感应中心定位法采用双向平动方式。它们都是用检测霍尔开关跳变区宽度的方法进行判位的。前者用跳变区几何中心做定位基准,后者用霍尔元件感应中心做定位基准。这两种方法与跳变边定位法相比最本质的差别是:它们都不使用跳变点做基准。这就最大限度的缩小了环境温度对定位基准的不利影响。由图l.2看出,基准点的温度漂移为:
由于△L1和△L2的符号是相反的(见图1.2-b),并且|OLIl≈|△L2|,因此△Lo≈0,可是其定位精度是很高的。试验表明,在一般工业条件下,它们的定位误差要比跳变边定位法小1~2个数量级。
霍尔开关定位系统结构及工作模型
图3是用于机床定位的霍尔开关系统典型结构。图4、图5是根据上述原理建立的两种工作模型。它们都采用步距脉冲(图中DP2)做测量标尺两个模型的不同点是:几何中心定位法测位终点在Og点,测位区要占据一定的行程长度.感应中心定位法测位终点在O点,测位区不占行程长度用上述模型建立的脉冲定位系统可应用于各种机械的点位控制。
霍尔脉冲定位系统在数控中的应用
图6是用于微机控制组合镗床的霍尔脉冲定位系统电气框图。
该测位系统以微机驱动机构的脉冲当量作为位移标尺,每一个或几个脉冲当量发出一个测位脉冲,因此系统的分辨率为土1脉冲步距。
系统的重复定位精度取决于下述三个因素,列式如下:△X =△XH+△Xz+△XK,式中,△X一定位系统的重复定位误差;△Xr一程尔开关的定位误差; △Xz一步进电机的1复定位误差;△Xk一传动机构的重复定位误差。根据步进电机的工作特性,其累计误差很小,可以认为它的重复定位误差△Xz≈0.
下一篇:霍尔开关在矿用开关电量检测上的应用 上一篇:霍尔元件在无损探伤中的应用
