


霍尔开关在电机位置及转速中的应用
电机转子位置与转速信息对于采用矢量控制的电机系统必不可少。但由于设计成本以及安装尺寸的限制,同时考虑到转速信息采样算法的复杂性以及采样的准确性,基于开关霍尔的位置检测方案有着明显的优势。霍尔开关成本低廉,体积小巧,安装和维修过程简单方便,在工业、家用电器、船舶、航天等领域有着广泛的应用,尤其适合一些成本敏感,同时需要对电机位置和转速进行分辨率不高的采样的系统。

霍尔开关位置及转速估算原理
霍尔开关位置及转速估算主要是对于开关霍尔状态切换信息的处理以及计算。为了保证电机位置估算的精确度,通常采用对称布置的三相霍尔来对电机位置进行检测。三相霍尔可以在提供六个电机转子的位置信号,且这六个信号是准确的,相比于单相和两相霍尔,在精度上有了很大的提高,且这种空间上的均匀分布,也使得它的输出信号与电机反电动势信号存在一定的对应关系,如图1所示。
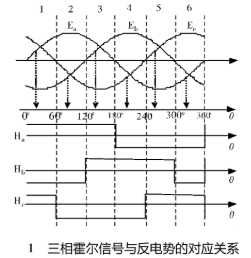
从图中可以看出,由于霍尔位置在空间上的对称分布,使得三个霍尔的输出信号相位互差120° ,且占空比为50%。当检测到当前霍尔信号的变化后,再将当前信号与之前所在扇区的霍尔信号进行比较,从而确定电机转子当前所在位置,进一步通过算法可以估算出转子的位置和转速信号。
但是由于它只能提供6个准确的位置信号,无法在电机连续运行时,提供转子在每个扇区内准确的位置信号,这就需要利用这六个准确的位置信号来对电机的真实位置进行估算。假设0。为所在某-扇区的转子初始角度,在理想情况下转子位置的表达式应该为

同样电机转子的位置也可以通过式(3)进行计算,在每一个检测周期内均认为电机转子为匀速运行:

式中, θ为当前电机转子的电角度rad; Ts为采样间隔s; wn为转子转速rad/s。
同时当它边沿到来时,对所计算出的转子位置进行自校验,将转子位置定位于霍尔开关输出信号的边沿位置。这样可以清除每一个扇区内由于电机转速突变带来的位置计算误差,增加位置信号的计算精度。
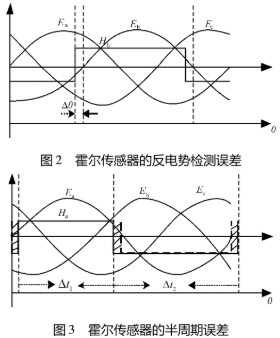
它对于电机转子位置和转速计算的误差主要来源于两个方面。第一个方面是霍尔开关自身设计和在电机转子内部安装过程中产生的固有误差,原因是霍尔开关在转子内部安装时很难做到完全的三相对称,总是存在一定的安装误差,如图2所示,以及霍尔信号半周期输出的不对称,如图3所示。这都会导致电机反电动势波形与霍尔输出信号不同步。
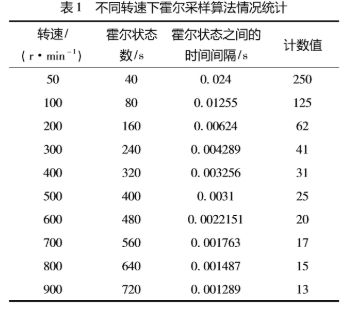
第二方面是算法中产生的误差,以实际运行参数为例,在低速和高速情况下,由于电机转速的差别非常明显,使得霍尔计数值以及霍尔状态转换之间的时间间隔在不同速度区间下差距明显,如表1所示。使得在高速情况下算法对于转子转速和位置的估算出现较大的误差。
位置检测算法的改进技术研究
本文对于基于霍尔周期采样的电机转子测速算法进行改进。采样周期仍然选用电气周期,但是在采样周期的选取中引入堆栈的概念,在电机运行过程中,六个霍尔状态连续更新,在每个新的换相周期到来时,将两个霍尔信号更新周期的时间间隔△tn+7,加入电周期△T ,将六个状态之前的时间间隔替换出去,与之前采样得到的5个△t相加得到新的计算电周期,利用新得到的△T来对电机转速进行计算。如图4所示。那么在电机转子转速可用式(4)计算得到:
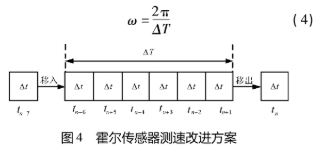
这种选取电气周期进行计算的方法虽然排除了霍尔开关安装过程中所带来的误差,而且采用采样时间动态更新的方式大大提高了原有算法的动态性能。但是在一些对实时性 要求更高的场合,这种算法仍然存在一定的滞后,因此可以对算法进行进一步的改进。在电机转速较低时,电机对于负载的变化较为敏感,系统运行过程中对于传感器的采样速度要求较高,此时可以选用两个霍尔信号变化的时间间隔,即一个霍尔换相周期作为采样周期。
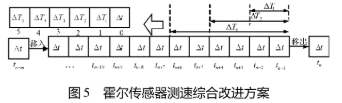
当电机转速升高,两个霍尔信号变化时间间隔变短,计数值变小,影响到采样精度时,可以选取间隔的两个霍尔信号变化时间作为采样周期。当转速进一步提高时,采样精度进一步下降,可以采用更多的霍尔信号变化时间组合成为采样周期。如图5所示。
霍尔开关位置及转速估算原理
霍尔开关位置及转速估算主要是对于开关霍尔状态切换信息的处理以及计算。为了保证电机位置估算的精确度,通常采用对称布置的三相霍尔来对电机位置进行检测。三相霍尔可以在提供六个电机转子的位置信号,且这六个信号是准确的,相比于单相和两相霍尔,在精度上有了很大的提高,且这种空间上的均匀分布,也使得它的输出信号与电机反电动势信号存在一定的对应关系,如图1所示。
但是由于它只能提供6个准确的位置信号,无法在电机连续运行时,提供转子在每个扇区内准确的位置信号,这就需要利用这六个准确的位置信号来对电机的真实位置进行估算。假设0。为所在某-扇区的转子初始角度,在理想情况下转子位置的表达式应该为
同时当它边沿到来时,对所计算出的转子位置进行自校验,将转子位置定位于霍尔开关输出信号的边沿位置。这样可以清除每一个扇区内由于电机转速突变带来的位置计算误差,增加位置信号的计算精度。
它对于电机转子位置和转速计算的误差主要来源于两个方面。第一个方面是霍尔开关自身设计和在电机转子内部安装过程中产生的固有误差,原因是霍尔开关在转子内部安装时很难做到完全的三相对称,总是存在一定的安装误差,如图2所示,以及霍尔信号半周期输出的不对称,如图3所示。这都会导致电机反电动势波形与霍尔输出信号不同步。
本文对于基于霍尔周期采样的电机转子测速算法进行改进。采样周期仍然选用电气周期,但是在采样周期的选取中引入堆栈的概念,在电机运行过程中,六个霍尔状态连续更新,在每个新的换相周期到来时,将两个霍尔信号更新周期的时间间隔△tn+7,加入电周期△T ,将六个状态之前的时间间隔替换出去,与之前采样得到的5个△t相加得到新的计算电周期,利用新得到的△T来对电机转速进行计算。如图4所示。那么在电机转子转速可用式(4)计算得到:
